利用 A1337 角度传感器 IC 进行低功率和转动计数感应
作者 Alihusain Sirohiwala Allegro MicroSystems, LLC
介绍
无论是工业自动化和机器人技术,还是电动助力转向 (EPS) 和电机位置传感,许多应用都需要监测旋转目标的角度。要设计一种可满足此类应用需求的成功的角度测量系统,必须依照用户的要求。应用说明 AN269115 和 AN269121 涵盖 Allegro 角度传感器 IC 在轴与离轴磁体配置应用中的使用。本应用说明介绍了如何在要求传感器在多任务模式下运行的电池供电应用(汽车或非汽车)中使用 Allegro A1337 角度传感器 IC。
要求传感器在熄火状态下仍然可以运行的汽车系统
有些汽车角度感应应用要求在熄火状态下仍然具备角位置监控能力。在熄火状态下,车内的大部分稳压器都不会运行。因此,必须在熄火状态下仍然可以运行的传感器通常直接由汽车电瓶 (12 V) 供电。此类应用包括:
- 安全带被动安全系统
- EPS 电机位置
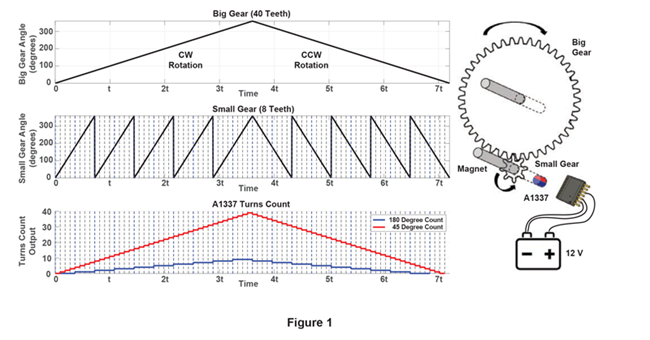
通常情况下,这些电机和安全带系统通过齿轮连接,因此角度传感器 IC 需要计算多个角度传感器旋转。为此,A1337 中采用了可以计算磁体旋转圈数的电路。当传感器 IC 与汽车电瓶连接时,必须具有低功率模式,方可保证电瓶的高效利用。即使当车辆处于熄火状态时,传感器 IC 仍然必须跟踪磁体的转动计数 (TC) 。即使是设置到低功率模式中时,A1337 仍然可以监控并持续跟踪 TC。这样可以保证系统可以在使用 A1337 时无论系统处于点火模式还是熄火模式都可以准确而且持续地跟踪方向盘的位置或安全带的张紧度。从传统意义上讲,这种熄火模式要求需要通过组合相对复杂的机械和电子组件才能够实现。A1337 降低系统复杂程度,并通过执行绝对角度测量和 TC 跟踪来减少多个系统组件,同时可以降低车辆在熄火状态下的电瓶功耗 (85 μA)。
A1337 产品概览
A1337 是一款基于磁性圆形垂直霍尔 (CVH) 技术的 360°角度传感器 IC,可提供无触点高分辨率角度位置信息。它具有包括下列功能的片上系统 (SoC) 架构:CVH 前端、数字信号处理和 SPI、SENT 和 PWM 输出。它包括片上 EEPROM 技术,可以灵活地对校准参数进行行尾编程。A1337 非常适合用于要求进行高速 0°至 360°角度测量的汽车应用,例如电子动力转向 (EPS)、旋转式换档器 (PRNDL)、安全带张紧器和油门系统。A1337 角度传感器设备设计用于支持各种有应用,而且有多种工作模式,可以按照输出模式或功耗进行设置。A1337 支持 SPI、SENT、PWM 和曼彻斯特协议接口等输出格式。在这些接口方面,A1337 有能力报告直接角度输出(通过选定的输出接口报告的 12 位数字角度输出)或转动计数 (TC) 输出,TC 输出是磁体目标在顺时针或逆时针方向转动的圈数的量化跟踪计数。在功耗方面,A1337 可以提供正常功率模式、低功率模式和超低功率运输模式。
正常功率模式
在正常功率模式中,IC 消耗最大电流(通常为 8.25 mA—请参阅 A1337 数据表中的正常模式供电电流规格了解具体数据),以支持全部的功能集并以 RPM 模式和 AVG 设置中选择的最高频率更新角度输出寄存器(请参阅 A1337 编程
参考了解更多详细信息)。
低功率模式
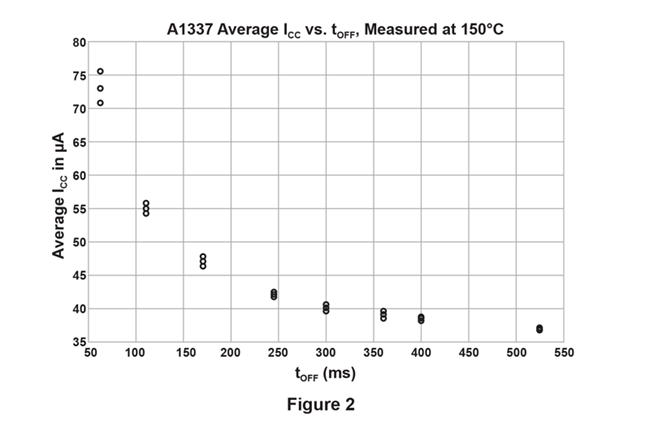
低功率模式对于电池供电的应用非常有用,在这些应用中跟踪目标旋转的任务可以分配到两种任务模式中的一种。第一种工作模式与角度跟踪模式相似传感器会跟踪全带宽输出并以全分辨率提供角度输出测量结果。第二种工作模式可以视为转数跟踪模式。这一模式中,传感器不需要以全分辨率跟踪角度,跟踪目标的转动计数值足以。转动计数单位的大小可以通过 A1337 中的 EEPROM 进行预设,可以设置为 180 或 45 度。A1337 将会在两个方向上跟踪 ±1280 转。在低功率模式下,A1337 大部分情况下将保持在较低操作稳态电流消耗状态。IC 不会通过 SPI、SENT 或 PWM 接口提供正常角度读数,而是会定期唤醒,检查是否存在转动计数。用户可以根据具体应用通过对片上 EEPROM 存储器进行编程来调节低功率模式运行的停止时间。图 2 中显示了平均 ICC (单位为 μA)与可编程的停止时间(tOFF)。
运输模式
某些由电池供电的应用要求在长期储存和/或运输过程中 IC 保持极低的功耗(例如新车从装配线运输到经销商的过程中)。为了满足这一需求,A1337 提供了超低功率模式,称为运输模式。运输模式用于将 A1337 设置到深度睡眠状态,保持极低的功耗。在这一模式中,传感器 IC 不会跟踪角度或转动计数。通常情况下,在运输模式中每颗 IC 晶片的电流消耗量仅为 30 μA。
WAKE 引脚
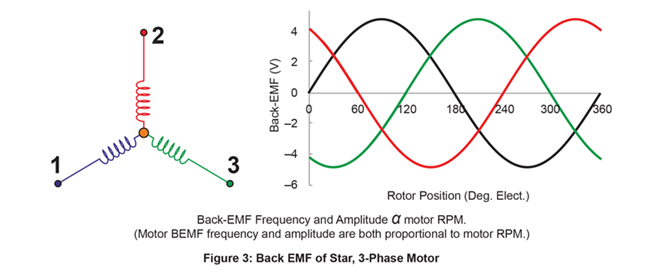
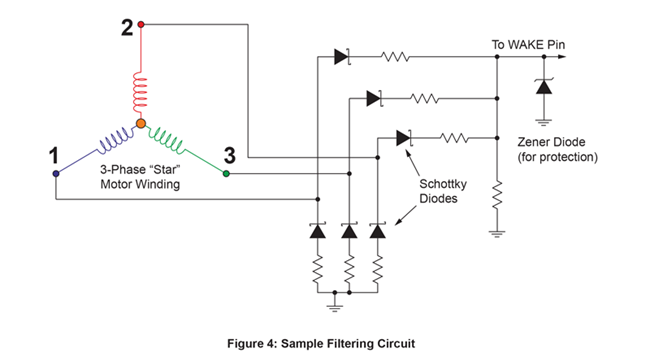
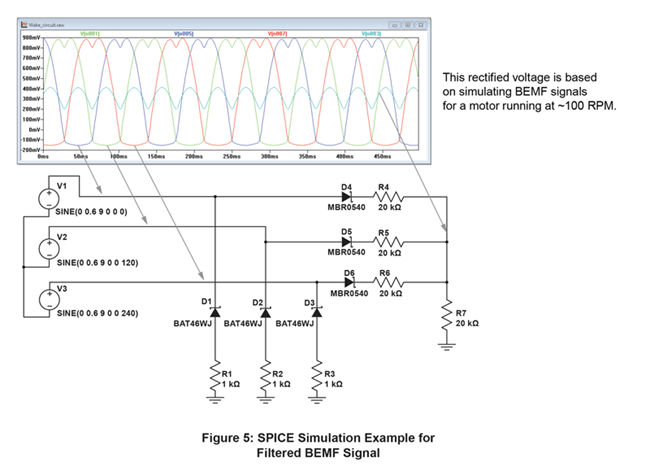
A1337 同时设有 WAKE 输入引脚。这一引脚用于从低功率模式中唤醒设备,尤其是当电动机加速度过高时,系统无法等到通过整个低功率睡眠阶段,并直接进入下一个唤醒阶段。当 WAKE 引脚上的电压阈值超过 VWAKE(HITH) 时,IC 将从低功率模式中唤醒并开始像正常功率模式中一样跟踪转数。这一引脚通常会连通由所用的电动机发出的反电动势电压信号,信号经过筛选。这样可以保证在发生高加速度的情况下可以快速获得电动机对转动计数电路的反馈。星型三相电动机的反电动势的波形表述符号以及样本筛选电路如下所示。
模式之间的切换
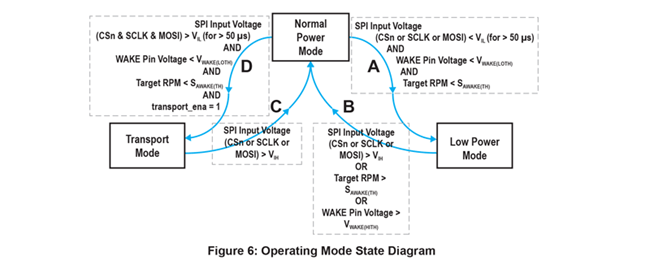
A1337 可以根据系统微控制器发出的指令或根据磁体目标的旋转情况或在当超过 WAKE引脚阈值 VWAKE(HITH) 时在正常功率模式 (NPM)、低功率模式 (LPM) 和运输模式 (TPM) 之间切换。这种双重方案可以保证传感器在低功率模式中运行时不会因为目标旋转过快而造成有价值的 TC 信息丢失。为了便于理解,我们可以想象一些与图 3 中的状态图
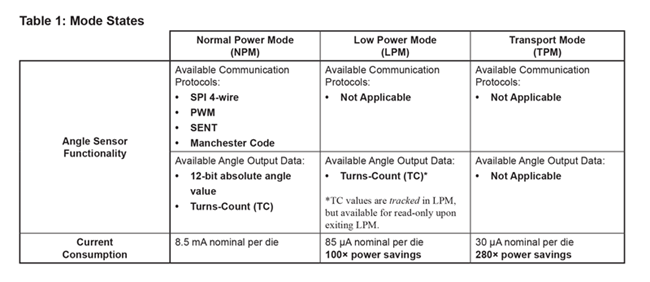
和表 1 中显示的信息相似的情况。假设,传感器通电并处于正常功率模式。因此,传感器可以提供表 1 中所述的正常功率模式下的所有功能。如果控制器决定需要进入低功率模式以节约功耗,则需要满足图 3 分支 A 中列出的所有条件才能进入低功率模式。换言之,A1337 SPI 线将在 50 μs 以上的时间内保持低功率,
A1337 IC 上的 WAKE 引脚电压需要低于阈值 VWAKE(LOTH),磁体目标的 RPM 需要低于平均速度 SAWAKE(TH)。如果满足上述所有条件,IC 就可以切换到低功率模式。在低功率模式中,IC 仍然可以支持 TC 跟踪功能,
如表 1 所述。如果系统现在需要从低功率模式中唤醒并进入正常功率模式,则要满足图 3 分支 B 中的任意一个条件,换言之,SPI 引脚上开始动作或目标旋转速度超过 SAWAKE(TH) 或 WAKE 引脚上施加的电压高于 VWAKE(LOTH)。在满足状态图分支 A、B、C 或 D 中规定的对应条件时,系统可以以类似的方式在正常功率模式、低功率模式和运输模式之间切换。
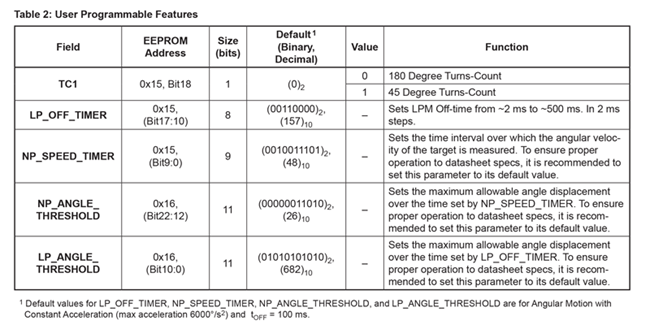
用于低功率模式和转动计数的用户可编程功能
结论