使用 Allegro A1262 的气隙独立式速度和方向传感
作者:Stefan Kranz,
Allegro MicroSystems, LLC
引言
A1262 集成电路是一款超灵敏双通道霍尔效应锁存器。与传统双通道锁存器相比,A1262 的正交输出指示旋转方向和旋转环形磁铁目标的位置/速度。但是,除了感测幅值以外,A1262 在使用垂直霍尔效应技术感测磁场方向方面是独一无二的。
A1262 使用传统的平面霍尔效应元件获得一个通道,用垂直霍尔效应元件获得另一个通道。因此,A1262 能产生正交输出信号(≈90° 相位差),其中相分离大体上独立于气隙、环形磁体尺寸或极间距。这为系统设计师选择环形磁铁及其相对传感器的位置和方向提供了前所未有的灵活性,其小封装 (SOT23-5) 替代了一对传统的封装霍尔效应锁存器,节省了空间和组件数量。
案例研究
此应用说明重点介绍众多可能系统配置中的两个。在这两个案例中, A1262LLHLT‑T 器件假定平面霍尔元件使用 Z 传感方向,而垂直霍尔元件使用 Y 方向(请参阅图 1)。A1262 替代版 A1262LLHLT‑X‑T 还可以提供 Z 和 X 方向感应。A1262 数据表和其他相关应用说明提供有关 A1262 的详细信息。
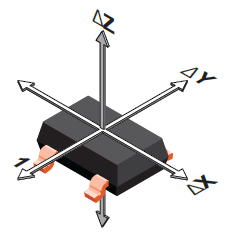
图 1:A1262 感应方向
在这两个案例中,目标是具有相同总体尺寸的铁氧体环形磁体。案例 1 采用多极环形磁铁。案例 2 采用径向磁化(1 个极对)环形磁铁(见图 1)。

图 1:环形磁铁
案例 1:多极环形磁铁
在此案例中,目标是具以下特性的环形磁铁。
外径:13 mm
内径:6 mm
高度:4 mm
极对:4
材料:铁氧体 Y10T,BR:≥0.2Ť
磁化:径向
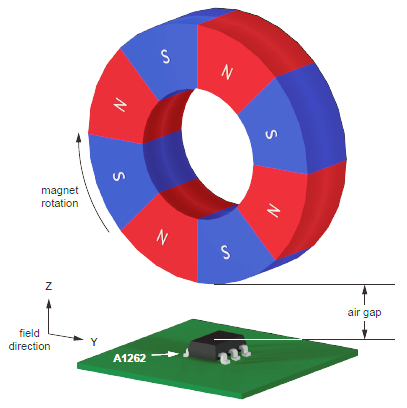
图 2:案例 1 的物理配置
图 3 和 图 4 显示案例 1 环形磁铁径向和切向磁场与周围气隙比较。径向磁场分量激励 A1262 平面霍尔元件,如图所示 Z 方向。垂直霍尔元件对应切向磁场,如图所示 Y 方向。
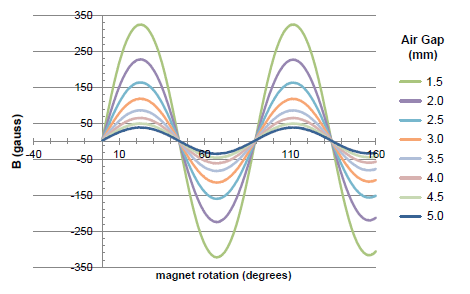
图 3:径向 B 磁场多极环形磁铁与气隙
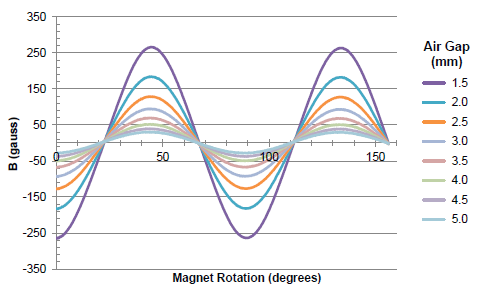
图 4:切向 B 磁场多极环形磁铁与气隙
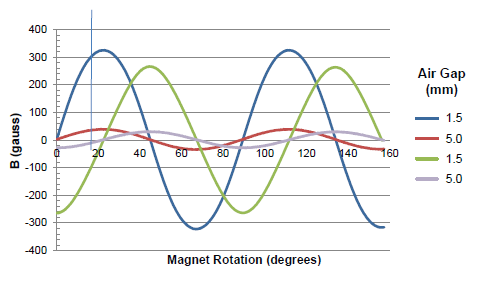
图 5:径向/切向 B 磁场多极环形磁铁与气隙
如图 3 和图 4 所示,每个通道(共两个)的磁性峰值的位置相对另一个通道基本保持一致。气隙几乎没有变化。图 5 仅显示最小和最大气隙分别为 1.5 mm 和 5.0 mm,更清晰地描述了这一点。
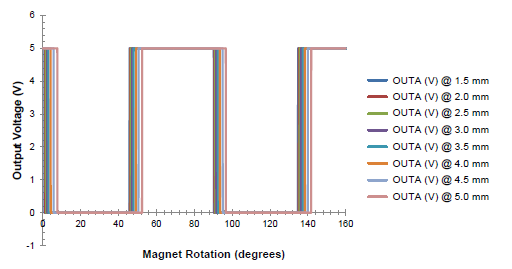
图 6:A1262 多极环形磁铁 OUTA(径向)与气隙
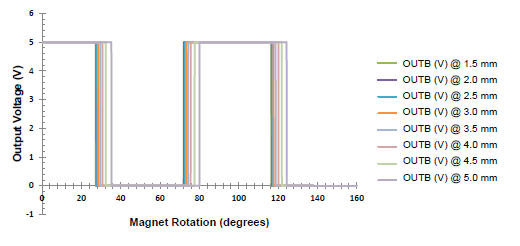
图 7:A1262 多极环形磁铁 OUTB(切向)与气隙
图 6 和图 7 显示使用 8 极环形磁铁的双传感器输出的磁开关行为。假定 A1262 磁开关点正常变化并且气隙变化较大,则 OUTA 和 OUTB 的相位关系会非常稳定。这种气隙独立性水平对 A1262 是独一无二的。
如下表 1 所示,两个输出还保持接近理想的 (≈50%) 占空比,并且与气隙无关。
| 气隙 (mm) |
OUTA 占空比 (%) |
OUTB 占空比 (%) |
|---|---|---|
| 1.5 | 49.71 | 49.83 |
| 2.0 | 49.77 | 50.00 |
| 2.5 | 49.77 | 49.60 |
| 3.0 | 49.71 | 49.83 |
| 3.5 | 49.71 | 49.88 |
| 4.0 | 49.54 | 49.83 |
| 4.5 | 49.88 | 49.48 |
| 5.0 | 49.65 | 49.71 |
案例 2:径向环形磁铁
在此案例中,目标是具有与案例 1 相同尺寸和相同材料的环形磁铁,但只有一对磁极:
外径:13 mm
内径:6 mm
磁铁高度:4 mm
极对:1
材料:铁氧体 Y10T,BR:≥0.2Ť
磁化:径向
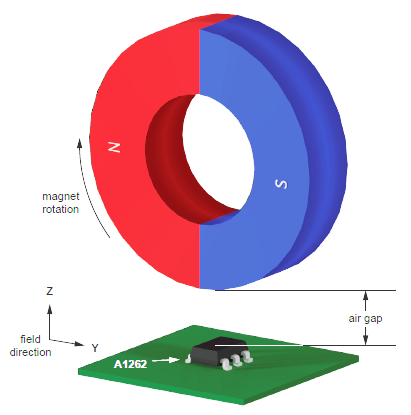
图 8:案例 2 的物理配置
图 8 显示案例 2 的物理配置图 9 和 图 10 显示环形磁铁径向和切向磁场与周围气隙比较。径向磁场分量激励 A1262 平面霍尔元件,如图所示 Z 方向。垂直霍尔元件对应切向磁场,如图所示 Y 方向。与案例 1 环形磁铁相同,每个通道(共两个)的磁性峰值的位置相对另一个通道基本保持一致。气隙几乎没有变化。图 11 仅显示最小和最大气隙分别为 1.5 mm 和 5.0 mm 的结果,更清晰地描述了这一点。
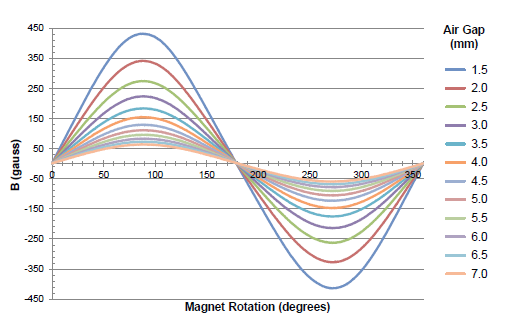
图 9:径向 B 磁场径向环形磁铁与气隙
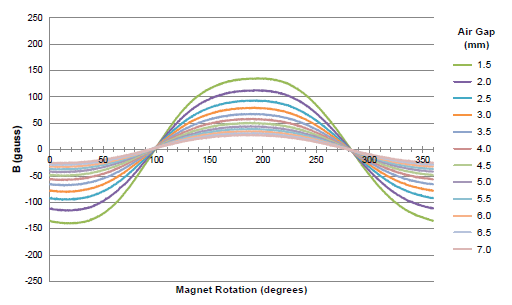
图 10:切向 B 磁场径向环形磁铁与气隙
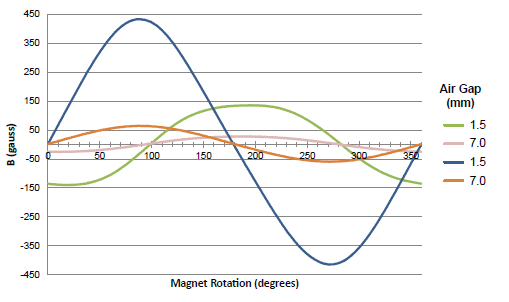
图 11:径向/切向 B 磁场径向环形磁铁与气隙
图 12 和图 13 显示使用单极对环形磁铁的双传感器输出的磁开关行为。假定 A1262 磁开关点正常变化并且气隙变化较大,则 OUTA 和 OUTB 的相位关系会非常稳定。
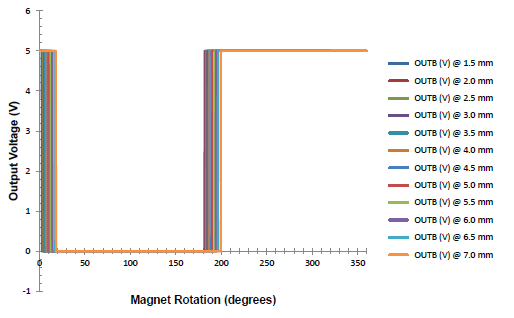
图 12:A1262 多极环形磁铁 OUTA(径向)与气隙
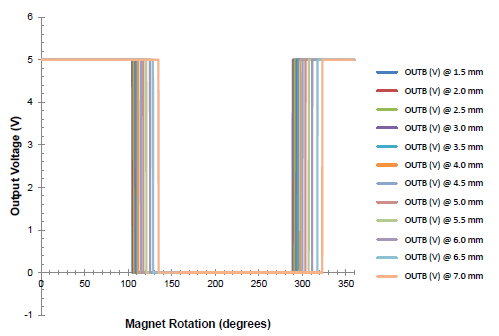
图 13:A1262 多极环形磁铁 OUTB(切向)与气隙
如下表 2 所示,两个输出还保持接近理想的 (≈50%) 占空比,并且与气隙无关。
| 气隙 (mm) |
OUTA 占空比 (%) |
OUTB 占空比 (%) |
|---|---|---|
| 1.5 | 50.34 | 48.86 |
| 2.0 | 50.34 | 48.72 |
| 2.5 | 50.34 | 48.72 |
| 3.0 | 50.27 | 48.65 |
| 3.5 | 50.07 | 48.65 |
| 4.0 | 50.27 | 48.32 |
| 4.5 | 50.07 | 48.52 |
| 5.0 | 50.27 | 48.32 |
一致的占空比
表 3 数据说明了气隙和环形磁铁磁极间距对 OUTA 和 OUTB 信号的影响很小。
| 环形磁铁 | 气隙 | OUTA 占空比 (%) |
OUTB 占空比 (%) |
|---|---|---|---|
| 案例 2 | 最小 | 50.34 | 48.86 |
| 最大 | 50.27 | 48.32 | |
| 案例 1 | 最小 | 49.71 | 49.83 |
| 最大 | 49.65 | 49.71 | |
| 平均占空比 | 49.99 | 49.18 | |
每个信号的占空比针对极间距只有超过 4:1 的少量变化,而针对气隙则是大于 3:1 的变化。用户可以单纯根据物理因素选择环形磁铁尺寸;磁极间距几乎和可以随意选择,以达到每转所需的周期数。
相分离
OUTA 和 OUTB 信号之间的相分离将随气隙的变化而有所改变。此现象与环形磁铁布置无关,并在图 14 和 15 显示,分别对应案例 1 和案例 2。
案例 1 多极磁铁的相移大约为 4.0° (26.5° – 22.5°),而案例 2 的单极环形磁铁的相移大约为 12° (102° – 90°),相移原因是内部霍尔元件间距、气隙和磁铁尺寸与材料的相互作用。
总相移的幅值(图 14 和图 15)取决于磁极数。对于给定尺寸的环形磁铁,磁极数越大(磁极间距越小),气隙对信号相位的影响越小。
OUTA 和 OUTB 信号的相分离通常稍大于 90°,这是因为 A1262 垂直和平面霍尔元件并不精确位与硅晶片相同的位置。
此信号相位与气隙关系意味着相位能表示系统气隙。例如,可以将其用于确认气隙在系统设置极限内。
通过以磁铁旋转的恒定速度测量 OUTA 和 OUTB 下降沿之间的时间就可以得到此“气隙信号”。该测量时间表示气隙距离,并且如果气隙变大,此测量时间也会变增加。
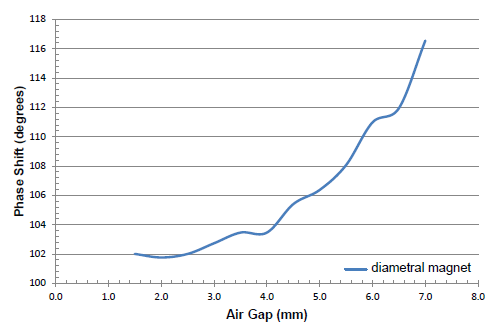
图 14:多极环形磁铁相对气隙的两个下降沿之间的相移差
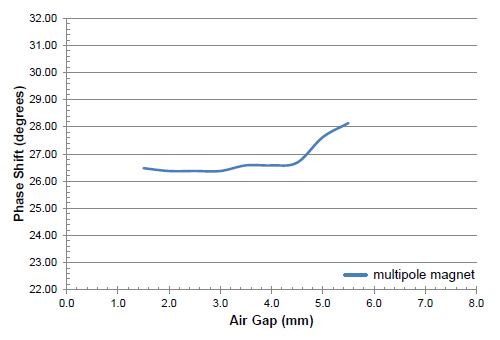
图 15:径向环形磁铁相对气隙的两个下降沿之间的相移差
意见/结论
如上所示,A1262 以独特的方式布置传统的平面和垂直霍尔传感器,具有以下优势:
- A1262 能产生正交输出信号(≈90° 相位差),其中相分离基本上与气隙、环形磁体尺寸或极间距无关。
- 系统设计师可以非常灵活地选择环形磁铁及其相对传感器的位置和方向。
- 用户很可能选择标准的现成环形磁铁,以提供需要的脉冲/旋转次数。
- 较大气隙的限制因素可能是切向磁场强度(此处案例所示 X 或 Y),这是因为切向磁场强度通常低于径向磁场强度。
- OUTA 和 OUTB 信号的相位关系能指示气隙。
测试回路
用于上述案例研究的应用回路是 A1262 数据表所示的典型应用回路,并在下图 16 中再现。
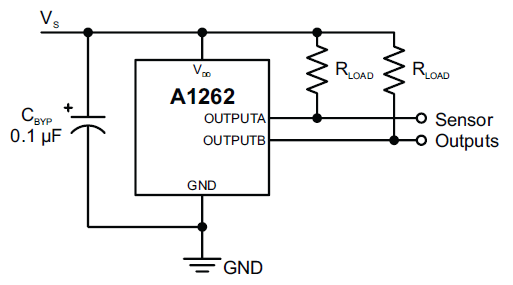
图 16:典型应用电路
环形磁体来源
案例 1 和案例 2 使用的环形磁铁可由以下零售商获得,它是 Allegro 和 Sanken Semiconductors 的分销商:
Matronic GmbH & Co.
Electronic Vertriebs KG
Vor dem Kreuzberg 29
D-72070 Tübingen,德国
电话: +49 7071 94440
传真: +49 7071 45943
网站:www.matronic.com
电子邮件:info@matronic.de