装有两个线性传感器 IC(测量 30 mm 位移)的霍尔效应系统的分析
作者:Sanchit Gupta、Andrea Foletto 和 Andreas Friedrich,
Allegro MicroSystems, LLC
传统的霍尔传感系统的磁体前部装有单独传感器,但磁场的线性测量仅限于较短的位移路径,除非使用尺寸更大的磁体。某些应用无法在系统内安装大型磁体。需要为此类系统提供一种解决方案,以在更大的位移范围内,获得更好的线性响应。在本应用说明中,我们将研究如何使用两个传感器 IC 来扩大线性检测的位移范围,我们以典型的 Allegro™ MicroSystems 器件的应用为例。
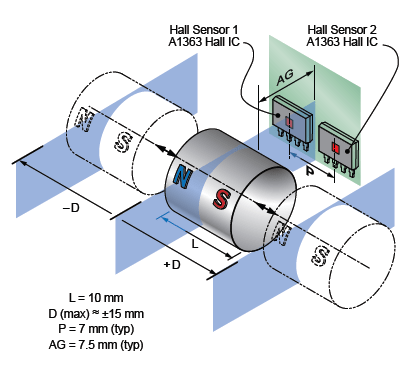
图 1.拟采用的系统装有两个Allegro MicroSystems A1363 传感器 IC 和一个直径 10 mm 的圆柱形磁体
简介
拟采用的系统包含两个霍尔效应线性传感器 IC,它们以固定的距离安放,并与磁体的平移路径平行(图 1)。两个传感器 IC 的霍尔元件之间的分离间距 (P) 取决于磁体长度 (L),并且与气隙 (AG) 无关。该过程被称为侧滑工作模式。
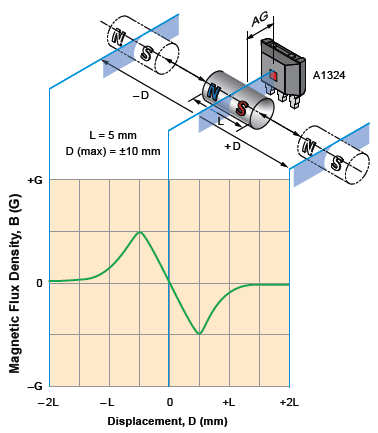
图 2.侧滑工作模式;采用单独传感器 IC 和圆柱形磁体的典型配置实例
测量值取决于磁体沿极化轴(北极-南极)的位移 (D),其中极化轴与两个 IC 形成的平面平行。这会使 IC 暴露于磁体的两级。图 2 显示了采用圆柱形磁体的侧滑工作模式的单独传感器 IC 的典型磁场映射。拟采用的系统装有一个 10 mm 长的圆柱形磁体,以确保通过约 30 mm (±15 mm) 的位移进行线性测量。图 3 显示了单独传感器的磁场映射。
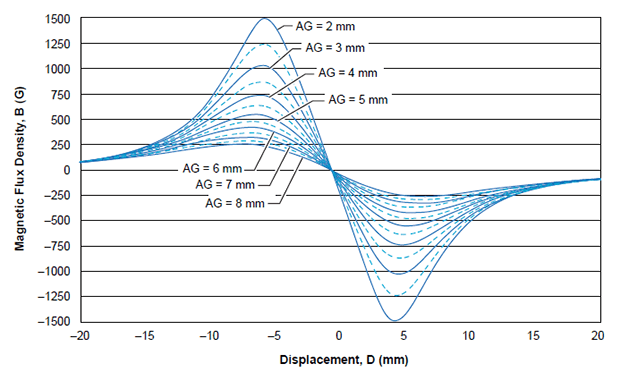
图 3.单独传感器 IC 对长度和直径分别为 10 mm 的圆柱形磁体(如图 1 所示的侧滑配置)的检测结果的磁场映射
根据对图 3 中映射的分析可以看出,线性响应的区域仅限于磁体中心的周围,这就解释了为何使用单独传感器只能测量较短的路径。深入分析映射后可以看出,磁场剖面与较大气隙范围内的正弦信号非常相似。如果两个传感器 IC 的磁场映射结果为正弦,当两个信号彼此的相位差为 90 度时,就能达到最大的线性范围。
利用函数 arctan2 可处理两个相位差为 90 度的正弦信号,以确保达到最大线性范围。运算式如下所示:
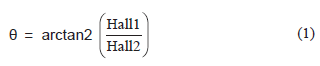
其中霍尔 1 和霍尔 2 分别表示传感器 1 和传感器 2 的输出。
因此需要确定两个传感器之间的最佳距离,这样就能达到 90 度的相移,从而减少系统内的线性误差。图 4 显示了两个传感器 IC 的映射,它们的安放位置可确保达到 90 度的相移。在此实例中,使用长度和直径分别为 10 mm 的磁体时,已选择 7 mm 的传感器间距。
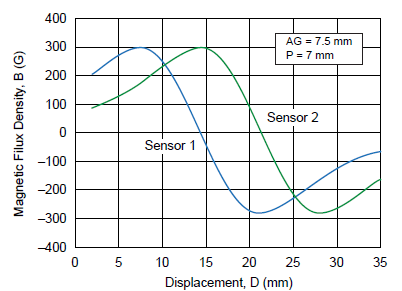
图 4.磁通量密度与磁体位移的对比
图 5 显示了代表位移量的反正切和最佳线性拟合。通过对比反正切曲线与线性曲线,可计算线性误差。图 6 显示了线性误差曲线。
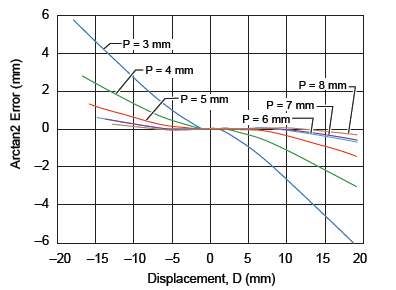
图 5.可测量线性误差的 arctan2 结果的最佳拟合曲线
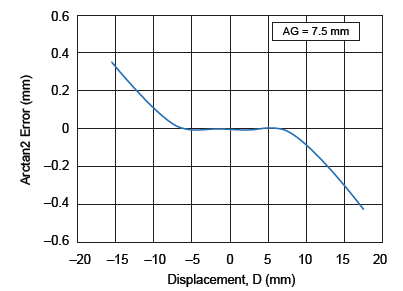
图 6.磁系统的线性误差曲线
分析映射数据以减少线性误差
在本节中,我们将分析两个传感器 IC 之间的间距(图 1 中的 P)和气隙 (AG) 的变化影响,以确定它们对线性误差的影响。通过在各种气隙下验证线性误差曲线,可确定两个传感器 IC 之间的最佳距离。图 7、图 8 和图 9 分别表示,当传感器间距在 3 - 8 mm 之间变化时,气隙为 3 mm、5.5 mm 和 7.5 mm 时的精度误差。
图 7.各种 IC 间距在 AG = 3 mm 时的线性误差
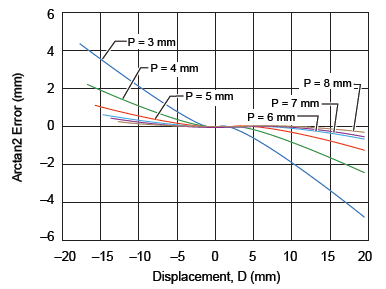
图 8.各种 IC 间距在 AG = 5.5 mm 时的线性误差
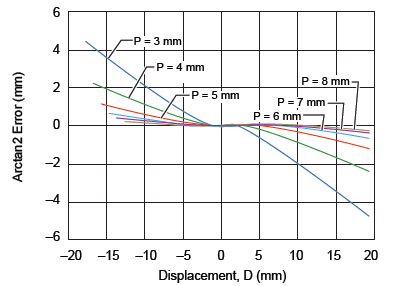
图 9.各种 IC 间距在 AG = 7.5 mm 时的线性误差
可以认为传感器间距与气隙无关,这样下一步就能在气隙为 3mm、5.5 mm 和 7.5 mm 时,绘制传感器间距 IC 为 7 mm 的线性误差曲线(图 10)。可以看出,线性误差随气隙的增加而减少。当气隙为 7.5 mm 时,能以 ±1% 的精度测量 30 mm 的位移。
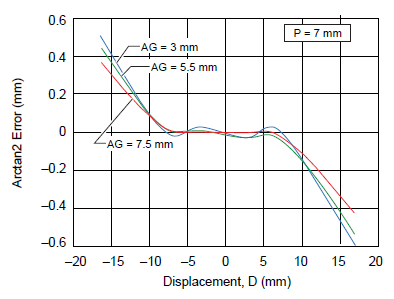
图 10.7 mm 传感器间距在各种气隙下的线性误差与位移的对比
图 11 显示了 7 mm 传感器间距在 3 mm、5.5 mm 和 7.5 mm 气隙下的线性误差 (mm) 与位移的对比。同样可以看出,误差随气隙的增加而减少。
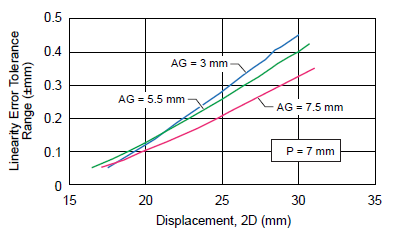
图 11.7 mm 传感器间距在各种气隙下的线性误差范围 (±mm) 与绝对位移的对比
通过磁场模拟验证测量值
本节介绍了针对 7.5 mm 气隙和 7 mm 传感器间距进行的详细分析。通过模拟磁场系统可验证之前映射产生的测量值。利用模拟结果可进行类似的线性误差分析。用于磁场模拟的工具是 ANSYS® Maxwell®。
图 12 显示了 7.5 mm 气隙和 7 mm 传感器间距的试验(映射)与模拟结果的输出绘图的对比。在两个实例中可以看出,正如预期的那样,传感器 IC 的响应与正弦信号非常相似。
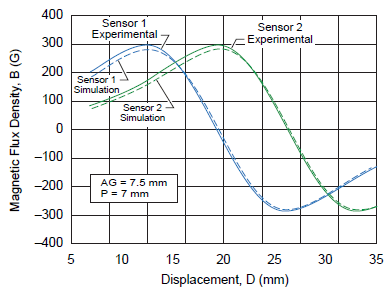
图 12.装有传感器 1 和传感器 2 的磁体的试验值与模拟值的霍尔输出结果
图 13 显示了使用两个真传感器 IC 和模拟时的线性误差曲线。误差的测量值以毫米表示。可以看出,磁场模拟的线性误差结果与具有特定尺寸的磁体的映射结果体现的误差结果非常相似。
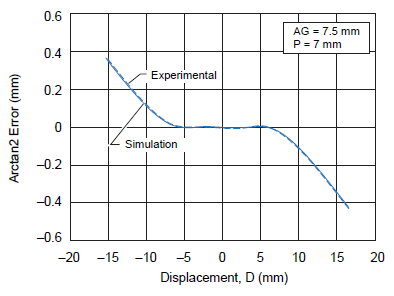
图 13.保持 7 mm 传感器 IC 间距和 7.5 mm 气隙时,A1363 的试验值与模拟值的线性误差曲线
使用两个 Allegro 传感器 IC 进行线性误差行为分析
在本节中,需要考虑偏移误差和灵敏度误差的影响,因为它们是每个传感器自身存在的误差。为此,需要分析两个线性传感器 IC 的组合。已使用 7.5 mm 的气隙和 7 mm 的传感器间距。我们将使用一对 Allegro 器件进行分析,先使用 A1363,然后使用 A1324。
A1363 器件的分析结果
Allegro A1363 是一种具有高带宽 (120 kHz) 模拟输出的低噪声、高精度和可编程的霍尔效应线性传感器 IC 。为便于分析,在两个 A1363 器件之间采用了 7.5 mm 的气隙和 7 mm 的间距。
需要考虑实际情况下的内在传感器误差。A1363 器件在整个汽车温度范围的灵敏度和偏移误差:
- 计算的 A1363 传感器的灵敏度误差 = 2.68%
- 计算的 A1363 传感器的偏移误差 = 4.44 G
误差个数取决于器件数据表参数的最坏情况下的统计计算。
已针对分析采用了两个传感器 IC 的最坏情况下的误差组合。在针对传感器 1 的等式 2 中,已为传感器 1 的理想霍尔输出增加灵敏度误差和偏移误差。对于传感器 2(等式 3),灵敏度与偏移误差的极性已反转:
![]()
![]()
图 14 显示了受偏移和灵敏度误差的影响,传感器 1 与传感器 2 出现和未出现移位的霍尔电压输出。图 15 显示了考虑和未考虑灵敏度和偏移误差的线性误差曲线。图 16 显示了取决于位移的 7.5 mm 气隙和 7 mm 传感器间距的容许误差。
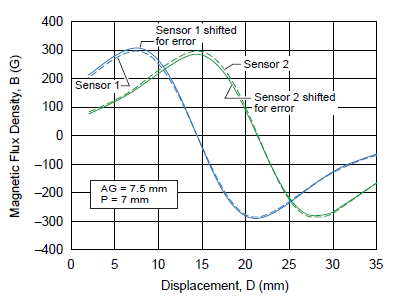
图 14.考虑和未考虑传感器 IC 偏移与灵敏度误差的 A1363 霍尔输出结果
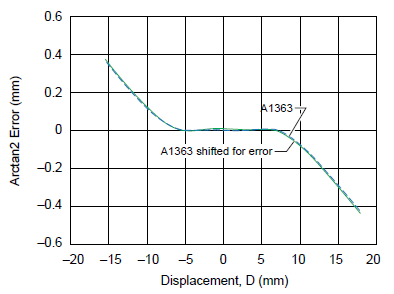
图 15.考虑和未考虑传感器 IC 偏移与灵敏度误差的 A1363 线性误差曲线
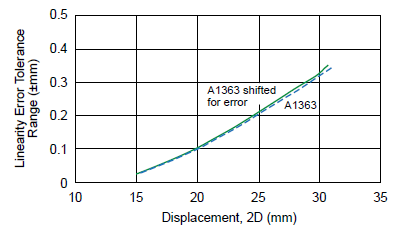
图 16.考虑和未考虑传感器 IC 偏移与灵敏度误差的 A1363 线性误差的容差范围 (±mm) 与绝对位移的对比
A1324 器件的分析结果
Allegro A1324 是一种具有模拟输出的低噪声霍尔效应线性传感器 IC。为便于分析,在两个 A1324 器件之间采用了 7.5 mm 的气隙和 7 mm 的间距。
需要考虑实际情况下的内在传感器误差。A1324 器件在整个汽车温度范围的灵敏度和偏移误差:
- 计算的 A1324 传感器的灵敏度误差 = 13.61%
- 计算的 A1324 传感器的偏移误差 = 27.10 G
误差个数取决于器件数据表参数的最坏情况下的统计计算。
已针对分析采用了两个传感器 IC 的最坏情况下的误差组合。在针对传感器 1 的等式 4 中,已为传感器 1 的理想霍尔输出增加灵敏度误差和偏移误差。对于传感器 2(等式 5),灵敏度与偏移误差的极性已反转:

![]()
图 17 显示了受偏移和灵敏度误差的影响,传感器 1 与传感器 2 出现和未出现移位的霍尔电压输出。图 18 显示了考虑和未考虑灵敏度和偏移误差的线性误差曲线。图 19 显示了取决于位移的 7.5 mm 气隙和 7 mm 传感器间距的容许误差。
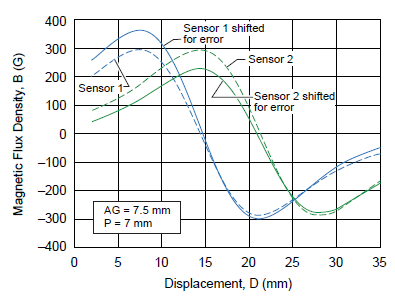
图 17.保持 7 mm 传感器 IC 间距和 7.5 mm 气隙时,A1324 的试验值与模拟值的线性误差曲线
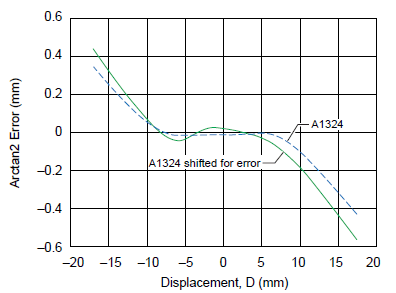
图 18.考虑和未考虑传感器 IC 偏移与灵敏度误差的 A1324 霍尔输出结果
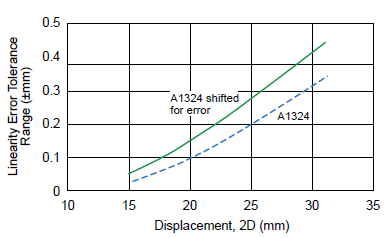
图 19.考虑和未考虑传感器 IC 偏移与灵敏度误差的 A1324 线性误差的容差范围 (±mm) 与绝对位移的对比
其他磁体配置的分析
我们采用其他两种圆柱形磁体配置进行了深入分析:
- 将直径 5 mm 和长度 10 mm 的圆柱形磁体指定为磁体 1
- 将直径 10 mm 和长度 20 mm 的圆柱形磁体指定为磁体 2
将在上一节中已分析过的直径和长度都是 10 mm 的圆柱形磁体指定为磁体 3。
按在上一节中对磁体 3 进行的分析,对磁体 1 进行了相同的分析,结果显示传感器 IC 之间的间距同样也是 7 mm。直径的差别不会影响传感器间距。
在对磁体 1 (直径比磁体 3 的小)的分析中可以看出,检测到的磁场强度减弱。这说明系统更容易受到传感器 IC 的灵敏度和偏移误差的影响。磁体 2 的长度超过磁体 3 的长度,为产生两个相移为 90 度的正弦信号,两个传感器 IC 的间距应为 12 mm。
可以看出,当磁体更长时(磁体 2),我们能以更小的线性误差测量范围更大的位移。例如,采用 ±0.03% 的精度可测量 30 mm 位移,采用 ±0.5% 的精度可测量 60 mm 的位移(图 20)。通过应用后处理线性化,可进一步优化分析结果(图 21)。

图 20.各种磁体配置的线性误差的容差范围与绝对位移的对比
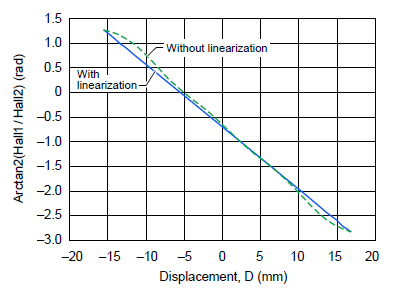
图 21.可减少线性误差的反正切误差曲线线性化的影响
总结
通过使用两个理想传感器 IC 和一个直径和长度都是 10 mm 的圆柱形磁体(称为磁体 3),可采用 ±1% 的精度测量 30 mm 的位移。
在放置两个传感器 IC 时,需要确保产生两个相位差为 90 度的正弦信号;所以,在此情况下,应采用 7 mm 的传感器间距。
如磁体 1 所示,使用理想传感器时,磁体的直径不会影响最大位移,但是在此情况下,检测到的磁场强度减弱,当考虑传感器 IC 的误差(偏移与精度)时,误差会增加。
就像在磁体 2 的分析中,通过将磁体长度增加到 20 mm,可采用 ±0.03% 的精度测量 30 mm 的位移,或采用 ±0.5% 的精度测量 60 mm 的位移。在此情况下,应调节传感器 IC 的间距,以产生两个相位差为 90 度的正弦信号。
当考虑传感器 IC 的灵敏度和偏移误差时,线性误差会略受影响。增加的线性误差取决于传感器 IC 的类型和磁场强度。如果采用非常精密的系统,可采用下列技术进一步减少线性误差:
- 使用两个以上的传感器 IC
- 使用尺寸更大的磁体
- 使用后处理补偿(如线性化),以修正残留误差
从以上分析可以看出,就位移范围测量和误差容差而言,磁场模拟的结果与各种磁体的经验测量值密切相关。因此,经验分析法与模拟分析法均可采用。